Hardware
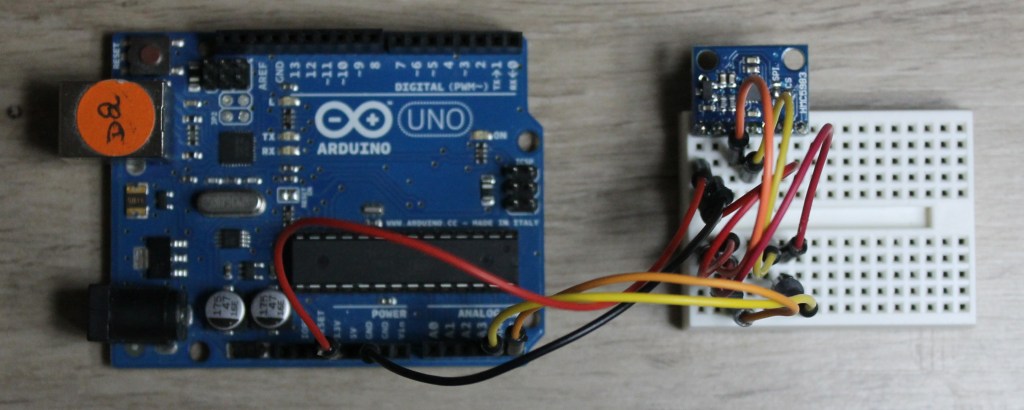
A alimentação é feita através dos pinos VIN e GND, que podem ser ligados ao +5 e GND do Arduino (pois o módulo tem um regulador de tensão). Aliás, este regulador suporta ligar também diretamente ao 3.3V, e foi isto que usei.
Vamos fazer a ligação usando I2C, que é a configuração padrão do módulo. Como vimos recentemente, a ligação direta funciona mas não é o mais recomendável. Por este motivo, resolvi experimentar usar o circuito sugerido pela Philips, com o 2N7000:

A Sparkfun tem um tutorial para uso de uma placa deles que não tem o regulador de voltagem e usa um modelo diferente de bússola (HMC5883L). O I2C é ligado direto.
Software
O tutorial da Sparkfun tem um exemplo bem simples de leitura dos valores brutos. Embora o modelo da bússola seja diferente, a programação é igual (a diferença é que o HMC5983 tem o sensor de temperatura para corrigir as leituras). Eis o código, acertado para o Arduino 1.0.5 (os métodos de TwoWire mudaram de nome):
/*
An Arduino code example for interfacing with the HMC5883
by: Jordan McConnell
SparkFun Electronics
created on: 6/30/11
license: OSHW 1.0, http://freedomdefined.org/OSHW
Analog input 4 I2C SDA
Analog input 5 I2C SCL
Alterado por DQ em 28/06/15 para Arduino 1.0.5
Codigo compativel com o HMC5983 do modulo GY-282
*/
#include <Wire.h> //I2C Arduino Library
#define address 0x1E //0011110b, I2C 7bit address of HMC5883
void setup(){
//Initialize Serial and I2C communications
Serial.begin(9600);
Wire.begin();
//Put the HMC5883 IC into the correct operating mode
Wire.beginTransmission(address); //open communication with HMC5883
Wire.write(0x02); //select mode register
Wire.write(0x00); //continuous measurement mode
Wire.endTransmission();
}
void loop(){
int x,y,z; //triple axis data
//Tell the HMC5883 where to begin reading data
Wire.beginTransmission(address);
Wire.write(0x03); //select register 3, X MSB register
Wire.endTransmission();
//Read data from each axis, 2 registers per axis
Wire.requestFrom(address, 6);
if(6 <= Wire.available()){
x = Wire.read()<<8; //X msb
x |= Wire.read(); //X lsb
z = Wire.read()<<8; //Z msb
z |= Wire.read(); //Z lsb
y = Wire.read()<<8; //Y msb
y |= Wire.read(); //Y lsb
}
//Print out values of each axis
Serial.print("x: ");
Serial.print(x);
Serial.print(" y: ");
Serial.print(y);
Serial.print(" z: ");
Serial.println(z);
delay(3000);
}
O exemplo que achei no eBay (e está nos aquivos do blog, em GY282.zip) é mais sofisticado. Foi escrito por uma "Love Electronics" que aparentemente não existe mais. A escala dos valores brutos é acertada e é calculada a direção baseado nos eixos X e Y (supondo que a bússola esteja horizontal). Em seguida é feita a correção entre o norte magnético e o norte verdadeiro (declinação) e o resultado é apresentado em graus.Para um exemplo realmente prático falta um dado adicional: a inclinação da bússola. A solução para isto é ter também um acelerômetro. Através do acelerômetro conseguimos descobrir para onde aponta a gravidade. Um pouco de cálculo vetorial e obtêm-se o ângulo exato (se não tiver nada interferindo).
Um comentário:
// Read data from each axis, 2 registers per axis
Wire.requestFrom (address, 6);
if (6 <= Wire.available ())
{
x = Wire.read () << 8; // X msb
x|= Wire.read (); // X lsb
z = Wire.read () << 8; // Z msb
z|= Wire.read (); // Z lsb
y = Wire.read () << 8; // msb
y|= Wire.read (); // Y lsb
}
Postar um comentário